RTK是 Real Time Kinematic 的英文缩写,中文意思是实时动态。而我们常说的RTK则是指RTK定位技术,即基于载波相位差分的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
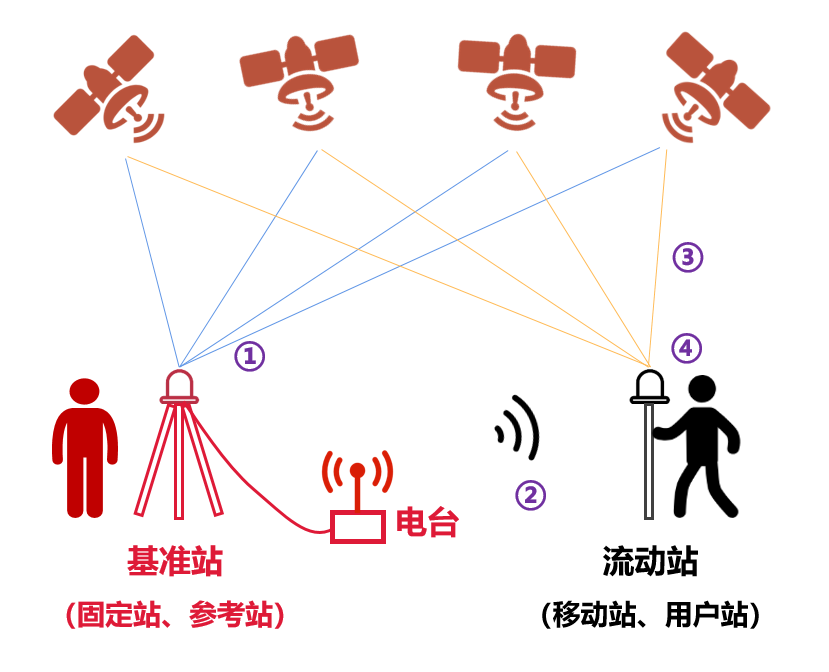
①基准站先观测和接收卫星数据
②基准站数据链(左图中使用的是电台),将观测数据实时发送给流动站(距离一般不超过20公里)
③流动站收到基准站数据的同时,也观测和接收了卫星数据
④流动站在基准站数据和自身数据的基础上,根据相对定位原理,应用差分技术解算出流动站的三维坐标及其精度
这里先简要介绍一下差分技术。该技术是利用两台接收机(一般称为基准站与移动站)同时观测同一组卫星信号,利用误差的空间相关性(即在一定基线距离条件下,两台接收机所观测的同一颗卫星其误差基本相等)进行差分计算,有效地消除或降低两站接收机间的公共误差部分(包括星钟误差、星历误差、电离层误差和对流层误差),以提高接收机定位精度。差分技术又可分为:伪距差分RTD(Real Time Differential)与载波相位差分RTK(Real Time Kinematic)。
伪距差分技术是差分定位方案中使用最成熟的技术。其原理是:基准站接收机通过卫星信号解码得到伪距测量值(伪距就是接收机到卫星之间的大概距离,其中包含有误差),然后再利用基准站的已知坐标及卫星星历信息,计算出基准站到卫星的真实几何距离,求出该距离与伪距测量值的差值即伪距测量误差,基准站利用数据链将此差值发送给移动站接收机,移动站接收机利用此差值修正其伪距,再进行定位解算,获得其准确位置。此技术可实现亚米级定位精度。
载波相位差分技术的原理是:基准站和移动站的接收机不断的对相同的卫星进行监测,并且移动站在接收观测到可视卫星信号的同时,基准站通过数据链将载波相位测量值实时发送给移动站接收机,移动站接收机将自身的载波相位测量值与所接收的载波相位测量值实时进行数据处理,解算出自身的空间坐标,完成高精度定位,载波相位差分的定位精度可达到厘米级。
PPK全称为 Post Processed Kinematic,中文意思为后处理动态,是一种与RTK相对应的定位技术,这是一种利用载波相位观测值进行事后处理的动态相对定位技术。在外业观测结束以后,对移动站与基准站 GNSS 接收机所采集的原始观测数据进行事后处理,从而计算出移动站的三维坐标。RTK与PPK的区别,一个是实时提供数据信息,一个是事后处理。因为是进行事后处理,所以用户无需配备数据通信链,观测更方便、自由,适合于无需实时获取定位结果的应用领域。