为了在无人机航测中准确确定位置和距离,必须记录物体的绝对位置。这就是RTK 和PPK发挥作用的地方。 这两种定位方式都旨在提供高度准确的位置信息,但它们的工作方式和最适合的应用场景有所不同。除了 RTK 技术和 PPK 技术,地面控制点 (GCP) 的使用可以进一步提高无人机测量数据的准确性。通过了解每种技术的优势和局限性,用户可以做出明智的决定并选择正确的GNSS技术,以达到其特定应用所需的准确度和精度水平。
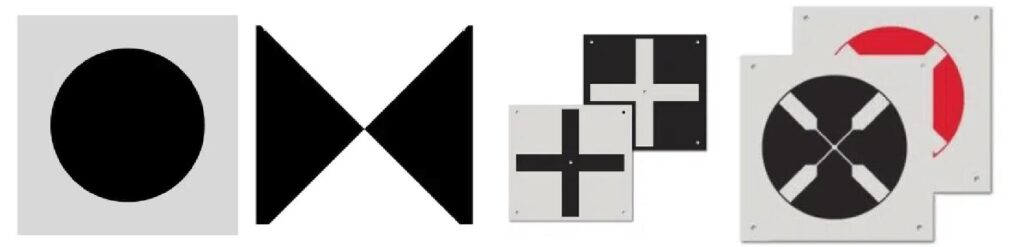
地面控制点 (GCP) 是无人机测绘中使用的重要工具,可提高无人机获得的地理参考图像的准确性。 从本质上讲,GCP 是划定在地球表面的物理标记,其位置已知,可作为无人机数据的参考点。
1. 地面控制点 Ground control points (GCPs)
作为无人机 GPS 数据的参考点。 GCP 通常设置在测区内的重要位置上,并且在测区有一定的覆盖度。通过使用 GCP,无人机测图可以达到亚厘米级的精度,这对于土地测量和建筑工地测绘等应用至关重要。但是,使用 GCP 有一些限制。 首先,设置 GCP 可能是一个耗时耗力的过程,需要一定的人力和时间去布置标记。 对于地形不平坦测区,这项工作是很艰巨的。 此外,使用 GCP 需要大量的后处理工作才能将点的地面坐标与其真实位置联系起来。
2. GCP的替代方案-RTK,PPK
为了破除这些限制,已经开发出新的GNSS 校正技术作为GCP 的替代方案。 这些技术使用实时空间位置校正来提高无人机空间位置数据的准确性,而无需在地面上设置物理标记。 这可以简化无人机测绘过程,减少设置和后处理所需的时间和人力。GNSS校正技术是一种通过使用GNSS接收器产生精确、高精度数据来提高位置数据准确性的方法。 它已在各个行业中使用多年,以提高从工作现场的不同工具获得的位置数据的质量。 然而,直到最近,这项技术才作为测绘无人机的附加组件提供,以获得测绘级的准确数据。RTK与PPK的GNSS修正技术不同,但目标相同:提高GNSS位置数据的准确性。 RTK 通过从 GNSS 卫星到地面站的持续连接,提供对 无人机GNSS 位置数据的实时校正。相比之下,PPK 使用后处理来提高事后 GNSS数据的准确性。 其 GNSS 数据是在无人机飞行期间收集的,然后使用软件进行后处理以提高其位置的准确性。
为特定航测项目选择合适的校正技术非常重要。必须了解 RTK 和 PPK 之间的差异,以确保能根据自己的需要选择正确的技术。通过了解这些技术的优点和局限性,无人机测量员才能就哪个系统将提供他们的项目所需的测量准确性和可靠性做出明智的决定。
RTK
RTK 无人机配备机载 GNSS RTK 接收器,可从卫星和地面 GNSS 基站捕获原始定位数据。 地面站作为参考点,在无人机飞行过程中实时校正位置。 这种对原始数据的实时校正可确保无人机不断获取其 RTK 定位,从而实现更准确的数据收集。为了提供高精度的定位数据,RTK 使用了一种称为载波相位跟踪的技术,该技术可以测量无人机接收到的 GNSS卫星与基站之间的连接相位差。 然后使用此相位差来计算无人机与地面站之间的距离。为确保准确性,RTK 系统使用称为大气建模的技术补偿可能影响无人机与 GPS 卫星之间信号强度的大气延迟。 这考虑了电离层和对流层等因素,并纠正了卫星时钟或轨道引入的误差。定位数据实时传输到无人机,使其能够准确导航和执行任务。综上所述,RTK 的工作原理是使用基站提供高精度定位,并将 GNSS 卫星的信号与该参考点进行比较,从而计算出无人机与基站之间的距离。 利用载波相位跟踪技术提供高精度定位数据,同时采用大气建模和纠错技术保证数据的准确性。RTK 的主要优势在于其高精度、实时数据能力、可靠性、易用性和通用性。 这些优势使其成为各种基于无人机的应用的绝佳选择,尤其是那些需要高精度和准确度的应用。虽然 RTK 无人机测量为无人机测绘提供了多项优势,但用户也应注意一些限制。
RTK 的局限性在于其对基站的依赖、范围有限、对 GPS 卫星的依赖以及高成本。 这些限制可能使其不适用于某些应用场景,尤其是那些在远程或具有挑战性的环境中的应用。 然而,在需要高精度的情况下,RTK 仍然是无人机可用的最可靠和精确的定位技术之一。
PPK
PPK也是一种空间位置的校正技术,它通过对从无人机飞行中收集的数据进行后处理来提高无人机 GPS 坐标的准确性。 与 RTK 不同,PPK 不需要基站提供准确的位置数据。PPK 模式的无人机从飞行中收集空间位置数据,然后对其进行后处理以提高GNSS坐标的准确性。 这使得 PPK技术成为基站访问受限时的理想选择。
PPK的工作流程
- 初始飞行:在初始飞行期间,PPK 无人机将在测量区域上空遵循预先设定的网格模式,以特定间隔拍摄照片。 当无人机捕捉图像时,它会将坐标标记到每张图像。 这对于后期处理数据至关重要,以便稍后为测量点生成准确的地理标记。
- 收集数据:PPK 首先从无人机飞行中收集地理位置数据。 这些数据包括无人机的位置、速度和带时间戳的GNSS信号测量值。
- 记录数据:地理位置数据记录在无人机的机载存储卡上。 这些数据通常以高频率(例如 5-10 Hz)收集,以确保有足够的数据来保证高准确度。
- 数据下载:无人机完成飞行后,数据从机载存储卡下载到计算机。
- 后处理数据:然后使用专用软件对空间位置数据进行后处理。 该软件将无人机收集的空间位置数据与参考站的数据进行比较,从而提供高度准确的位置。
- 计算修正值:后处理软件根据地理位置数据准确计算出正确的图像位置。 这是基于无人机的位置数据与参考站的位置数据之间的差异。 这些修正包括大气条件和卫星时钟误差等因素。
- 生成精确坐标:一旦计算出修正值,后处理软件就会为无人机的飞行生成精确的坐标。 这些坐标通常精确到几厘米以内。
- 应用坐标:最后,将精确的坐标应用于无人机的图像。 这需要对数据进行准确的地理配准和映射。
总之,PPK 通过在飞行过程中收集 地理位置数据并根据参考站数据进行校正后处理,提高了无人机坐标的准确性。 这使得 PPK 成为基站受限不利条件下的理想选择。同样,PPK也有他的局限性。PPK不提供实时数据,需要一个后处理步骤来提高坐标的准确性,这可能很耗时,后处理所需的时间将取决于数据集的大小和校正因子的复杂性,用户可能需要等待后期处理结束后才能获得高精度的定位数据。另外,与 RTK 一样,PPK 也依赖于与GNSS卫星的可靠连接。大气条件、树冠或高层建筑等各种因素的影响,会导致信号丢失或定位数据不准确。
| 项目 | RTK | PPK |
| 坐标提供的时效性 | 实时提供 | 需要经过后处理 |
| 对基站的依赖性 | 需要基站提供准确的位置数据 | 独立于基站 |
| 与基站之间的连接 | 要求可靠的连接 | 无需连接 |
| 工作范围 | 10km范围内 | 可大于10km |
一般来说,PPK 是更好的选择。 在使用无人机进行测量或测绘项目时,将 PPK 图像与 GCP(地面控制点)相结合可以实现最佳的绝对精度。 虽然仅 PPK 就可以提供高度准确的 GPS 坐标,但结合 GCP 通过提供地面上可用作后处理过程中可参考的已知点,进一步提高了数据的准确性。 通过结合 PPK 和 GCP,可以确保数据尽可能准确并满足项目的特定要求。